Abstract
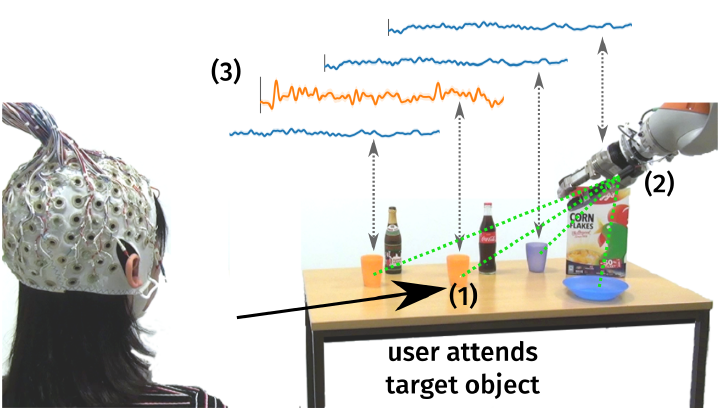
Interpreting the brain activity to identify user goals or to ground a robot’s hypotheses about them is a promising direction for non-intrusive and intuitive communication. Such a capability can be of particular relevance in the context of human-robot cooperation scenarios. This paper proposes a novel approach to utilize the natural brain responses to highlighted objects in the scene for object selection. By this, it circumvents the need for additional interfaces or user training. Our approach uses methods from information geometry to classify the target/non-target response of these event-related potentials. Online experiments carried out with a real robot demonstrate an accurate detection of target objects solely based on the user’s attention.