Henrich Kolkhorst
brains, robots, running
brains, robots, running.
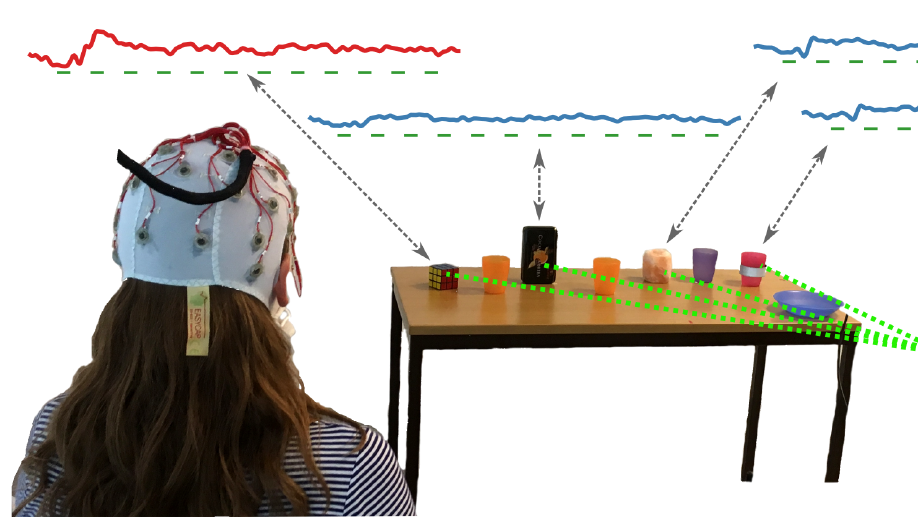
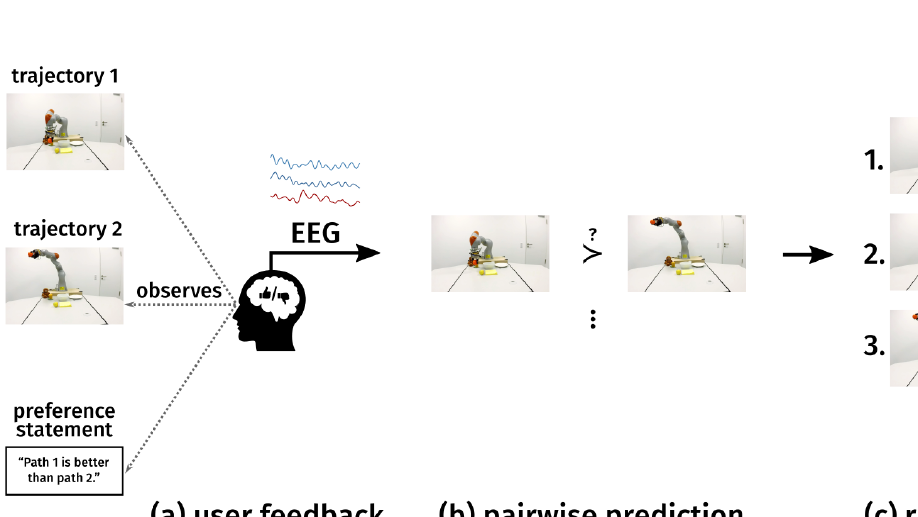
I am interested in decoding users' brain states to improve human–robot interaction. Specifically, I work on learning from non-invasive brain signals to predict user judgment and preferences. These predictions allow users to influence not only what the robot does but also how these actions are performed.
In my free time, I enjoy endurance sports : running, cycling, swimming—also combined in triathlons.
Interests
- brain–machine interfaces
- human–robot interaction
- brain state decoding
Education
-
PhD candidate in Computer Science
University of Freiburg
-
MSc in Computer Science, with distinction, 2013
Karlsruhe Institute of Technology
-
BSc in Computer Science, with distinction, 2011
Karlsruhe Institute of Technology